sábado, 24 de outubro de 2009
quarta-feira, 26 de agosto de 2009
Google SketchUp Pro 6
Google SketchUp Pro 6
http://sketchup.google.com/3dwarehouse/details?mid=fbe62759c10c702a7e20a5c42fa9976a&prevstart=0Google SketchUp Free download
Construa modelos em 3D, crie apresentações profissionais em 2D, entre outros (inclui o LayOut).
Saiba mais sobre o SketchUp Pro 6
Fazer o download de uma versão experimental válida por 8 horas
http://sketchup.google.com/3dwarehouse/details?mid=bbe0b4de4648f9c141704b7124782e9&prevstart=0&hl=pt-PT&ct=lc
Robô Rastreador
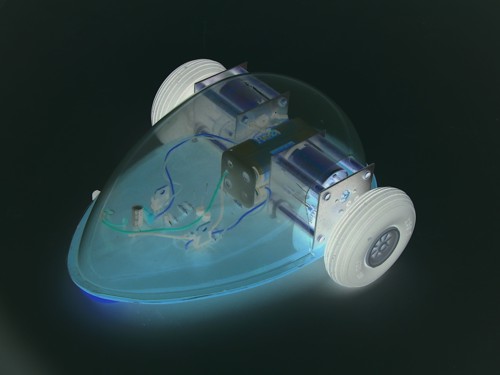
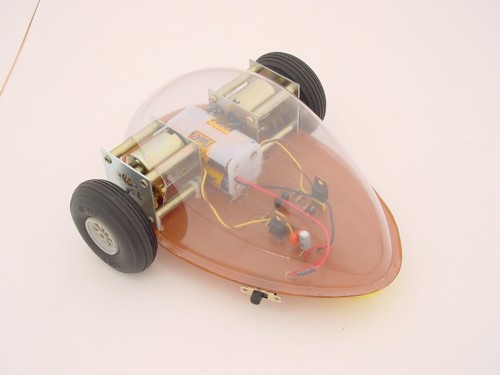
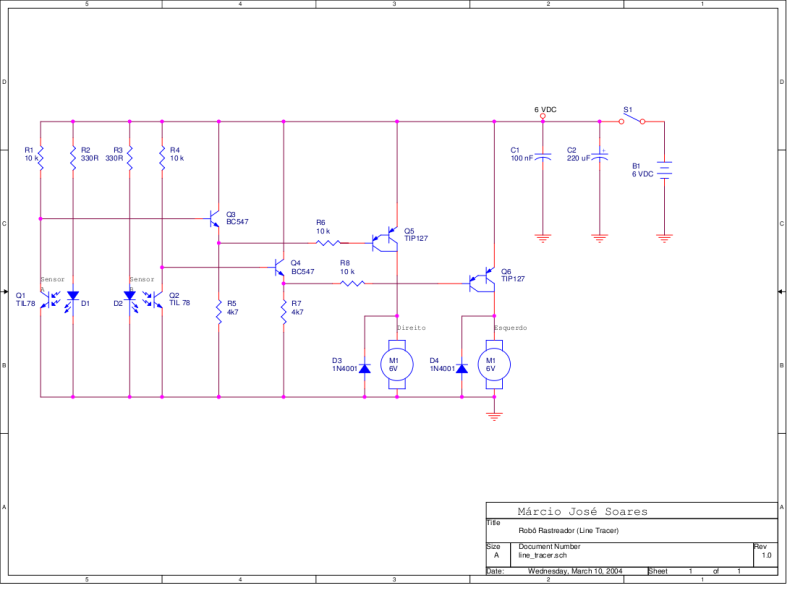
O robô rastreador é capaz de seguir uma linha, sem o uso de circuitos lógicos ou microcontrolador. Ele utiliza apenas transistores (4 no total) e um par de emissor/receptor de infravermelho (TIL32/TIL78). Apesar de possuir uma configuração bem simples, este robô é capaz de agradar qualquer "marmanjo".
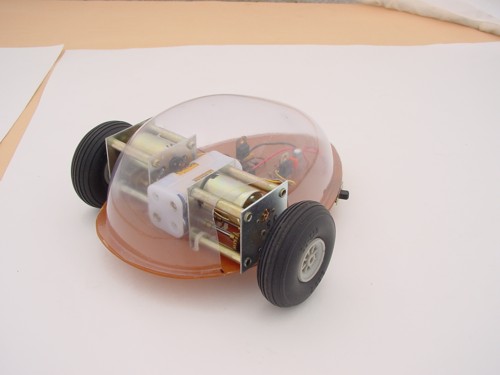
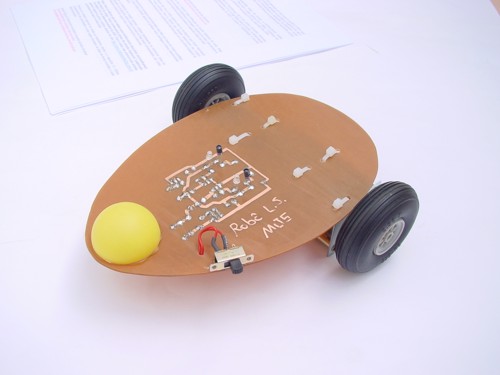
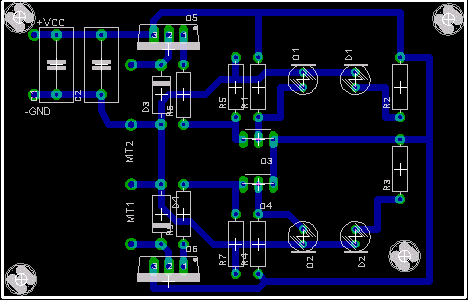
O chassi do robô foi feito a partir da própria placa de circuito impresso, em fenolite. A carenagem do chassi é uma forma de ovô de páscoa caseiro de 750gr. A "roda boba" foi adaptada de "meia" bolinha de "ping-pong". Os motores utilizados são da Symphony Robótica Educacional. Tudo muito simples, mas bastante funcional.
Veja mais algumas imagens. Clique para ampliar.
 |  |  |  |
| Vídeo demonstrando o funcionamento do robô |
CIRCUITO
MONTAGEM (Placa)
DOWNLOADS:
- Circuito do Robô Rastreador (arquivo PDF)
- Desenho do Lay-out para o circuito impreso - lado inferior - invertido (arquivo PDF)
- Lista de materiais (veja circuito)
 | Este projeto foi publicado, com minha autorização, na Revista Mecatrônica Fácil nº 16 de maio/junho de 2004. Especificações: - Cérebro - nenhum, apenas transistores |
| Copyright deste conteúdo reservado para Márcio José Soares e protegido pela Lei de Direitos Autorais LEI N° 9.610, de 19 de Fevereiro de 1998. É estritamente proibida a reprodução total ou parcial do conteúdo desta página em outros pontos da internet, livros ou outros tipos de publicações comerciais ou não, sem a prévia autorização por escrito do autor. |
Braço mecânico para MSX ou PC
Braço mecânico para MSX ou PC
Quando comprei meu MSX em 1991, já gostava muito de eletrônica e lia muitas revistas especializadas e uma delas era a Saber Eletrônica. Lembro-me do número 215 de dezembro de 1990. Este número trazia na capa o projeto de um braço mecânico para ser operado através da porta paralela de um micro MSX ou PC de autoria de Marco Antonio Marques de Souza. Na época ainda não possuía um MSX (1990), e o projeto não despertou meu interesse. Somente quando comprei meu MSX lembrei-me do projeto na revista e resolvi montá-lo.
Minha primeira dificuldade foi encontrar motores com caixas de redução adequadas e também projetar a garra que não fazia parte do projeto original, mas que para mim era de suma importância. O projeto original previa que o braço fosse feito com um "L" em sua ponta para poder levantar objetos. Nada contra!!! Mas como o próprio autor disse, o projeto era passivo de "alterações".
|
|
|
|



O projeto que agora apresento ficou pronto no final de 1991 e estava guardado com meu MSX. Retirei a poeira, digitei o programa novamente e realizei as alterações feitas na época (pelo menos as que lembrava!!) e ai esta!!!. Qualquer dúvida envie-me um e-mail
Especificações:
- Cerebro - Micro-computador MSX ou PC
- Motores - 4 motores: 1 p/ giro, 1 p/ elevacao, 1 p/ elevaçao da garra e 1 p/ garra.
- Sensores - nenhum
- Alimentação- 4 pilhas médias ou fonte 6V 1000mA
- Chassi - Alumínio, plástico, acrílico, nylon e outras (... que salada!!!)
- Programa - MSX-Basic ou Basic-PC (Basica ou GWBasic)
Copyright deste conteúdo reservado para Márcio José Soares e protegido pela Lei de Direitos Autorais LEI N° 9.610, de 19 de Fevereiro de 1998. É estritamente proibida a reprodução total ou parcial do conteúdo desta página em outros pontos da internet, livros ou outros tipos de publicações comerciais ou não, sem a prévia autorização por escrito do autor.
Robô Octa I
Robô Octa I

Introdução
Como a maioria sabe, esse robô é o que veio ilustrado na capa da revista mecatrônica fácil número 1,
esse robô possui alguma inteligência pois não é apenas um carrinho que você monta, liga e ele sai ai se
chocando contra tudo, ele consegue desviar muito bem de obstáculos. Com essa página você será capaz
de montar esse robô.
Componentes para montagem
A lista de componentes pode ser mudada, é possível construir esse mesmo robô, usando uma estrutura de
papelão por exemplo, ou um outro microcontrolador mais barato. Para fazer esse robô eu usei:
1 Microcontrolador Basic Step 2K 1

1 Módulo Sonar

1 Capacitor eletrolítico de 100 microF x 16 V
1 Diodo 1N4004 ou 1N4007
1 Suporte para 4 pilhas pequenas
2 Pneus de Aero Modelo (7 cm de Diâmetro)

1 Roda boba que nem de carrinhos de super mercado ( 3 cm de Diâmetro)
1 Cabo para Gravação de programas no Basic Step 2K

1 Placa universal para a construção de circuito elétrico.
Fios para usar na montagem do circuito
Chapa de plástico de 2 mm de espessura (para a estrutura)
2 Servos motores modificados para Rotação

Estrutura do Robô
Eu não considero para esse robô a estrutura algo muito importante, as medidas que eu usei foram aquelas fornecidas pelo site
da mecatrônica Fácil. A única coisa que eu gostaria de salientar é que eu não consegui cortar as chapas de poliestireno com 2 mm
de espessura com um estilete (como foi mencionado na revista mecatrônica), eu fui obrigado a usar o disco de corte da Dremmel
que deu conta muito bem do recado. Em anexo estão os desenhos da Revista Mecatrônica Fácil para a estrutura.



Parte Eletrônica
O circuito elétrico usado é bem simples, a única coisa que eu recomendo é que a conexão dos motores
na placa seja feito por plugs, ao invés de se soldar os cabos dos motores diretamente na placa, pois assim
você fica livre pra usar os motores em outros robôs.
Circuito eletrônico

Carregando o Programa no Basic Step 2K
Carregar um programa no Basic Step 2k, é uma das coisas mais fáceis do projeto, você precisa primeiro
de um compilador e um software de comunicação com o seu microcontrolador. Eu atualmente estou usando
o BASCOM que é um compilador BASIC e já faz a comunicação com o Basic Step 2K, através da porta
pararela (veja o cabo de comunicação no começo desse texto). Não se esqueça que o microcontrolador
deve estar alimentado para fazer a gravação na memória (isto é, deve estar entrando 5V no pino 5 e 0V no
pino 2). Alguns erros podem ocorrer para quem não tem prática com microcontroladores, se na hora da
gravação aparecer a seguinte mensagem: Could Not identify chip with id #XXXXX, isso quer dizer que você
esqueceu de alimentar o microcontrolador ou inverteu o lado do cabo de gravação de dados, ou não configurou
corretamente no Bascom o endereço da porta paralela normalmente são usados os endereços 378 ou 278 verifique
isso no gerenciador de dispositivos do windows e configure corretamente no BASCOM.
Obs: Você pode encontrar o compilador BASCOM em: http://www.mcselec.com/download_avr.htm
Não se esqueça de pegar também a LIB de programação usada para os servos MyMcs.lbx
Regulagem dos Servo Motores
Normalmente os servos modificados não estão com a regulagem certa para responder aos comandos do
microcontrolador, para fazer isso carregue esse programa no microcontrolador (programa1), abra seus
servos e ligue o seu robô OCTA I, provavelmente você vai notar que os servos estão em operação, com
o servo aberto, ajuste o TRIM-POT (que é um potenciômetro) dos dois servos até que eles parem totalmente,
agora já pode fechar os seus servos e instalar as rodas pois eles estão devidamente regulados.
Programa Final
Clicando aqui você pode pegar o código fonte final para o OCTA I. Esse código fonte é diferente daquele
encontrado no site da revista mecatrônica fácil. Com esse programa o seu robô irá se movimentar bem mais
rápido e com mais agilidade, sem interrupções de movimento quando detectado um obstáculo. Qualquer
duvida ou comentário me mande um e-mail: rubens.bardelli@poli.usp.br
Extra 1
Nessa seção extra, está disponível um programinha para o OCTA I muito interessante, o robô mantém uma
distância fixa de um obstáculo, se o obstáculo se mover para longe do robô, o robô se move em direção ao
obstáculo até chegar aquela distância fixa onde o robô para novamente. Agora se o obstáculo se mover em direção
ao robô, o robô se move em sentido de se afastar do obstáculo. Isso simula a nova tecnologia que faz com que
os carros não batam e sempre mantenham uma distância segura do carro da frente. Veja bem que o programa
pode ser melhorado muito através das técnicas de projeto de controladores, aliás, alterando os valores de
W e W2 você poderá visualizar nitidamente (pelo movimento do robô) alguns resultados previstos pela teoria
de controle, pegue o programa clicando aqui.
Extra 2
Não esqueça de visitar a GALERIA de videos e fotos dos robôs expostos nesse site, bem como consultar onde
se pode comprar peças na seção de ONDE COMPRAR?. Se você possuir algum programa interessante para
o Robô Octa I, por favor, disponibilize para a gente, pois se for interessante, colocaremos disponível no site.
Robô Alpinista
| http://www.arnerobotics.com.br/eletronica/robotica/alpinista.htm Robô Alpinista
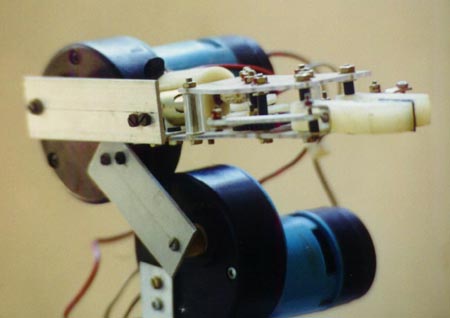
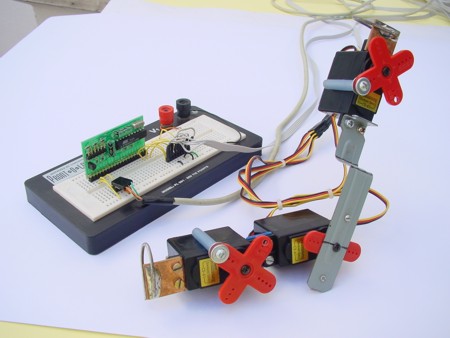
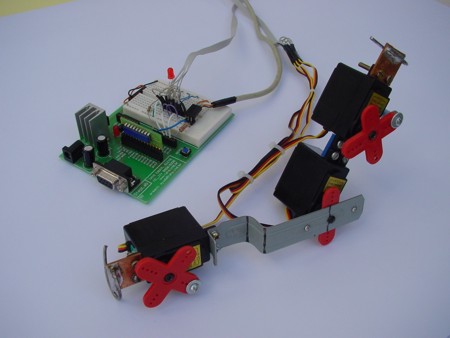
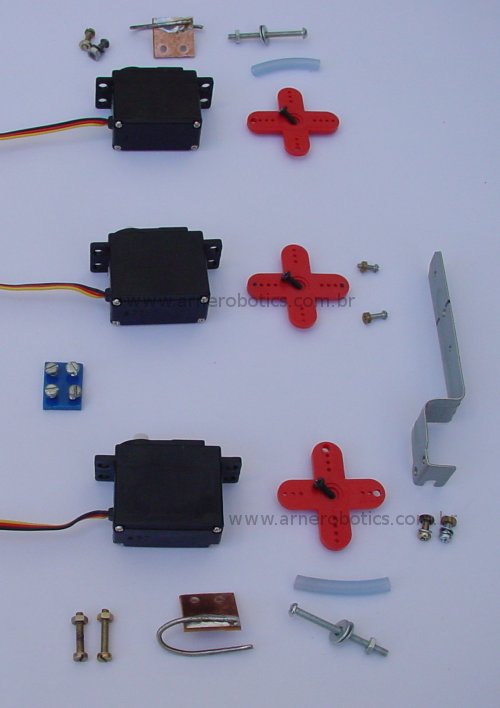
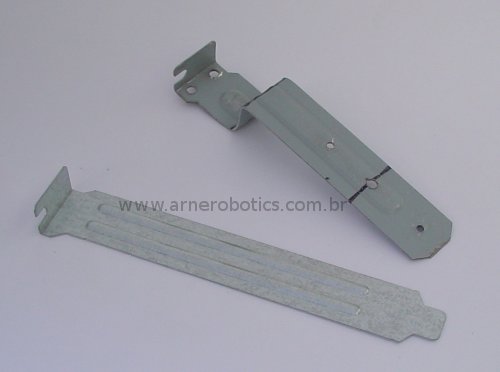
O Robô Alpinista é um robô "mais que diferente", pois não utiliza rodas, "pernas", esteiras, e outras para sua locomoção. Ele usa as garras e a articulação do seu "corpo". A parte mecânica é extremamente simples e foi desenvolvida com material de sucata (.. veja as fotos!). Ele pode percorrer um cabo na vertical ou na horizontal. A velocidade de deslocamento não é grande, mas vê-lo em "ação" é muito interessante. Clique para ampliar
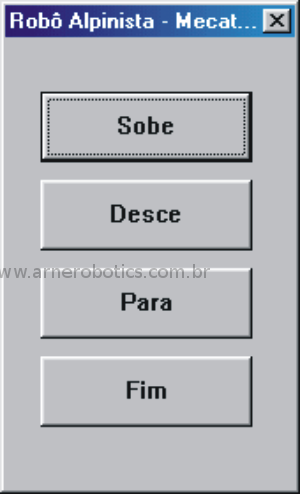
Todo o controle é feito através de um PC com LOGO, http://www.nied.unicamp.br, ou outro programa qualquer e um BASIC STEP 2K (http://www.tato.ind.br). Eu desenvolvi duas versões: uma com o BASIC STEP 1 e outra com o BASIC STEP 2K, sendo esta última a que apresentou os melhores resultados e, portanto, a que será aqui comentada.
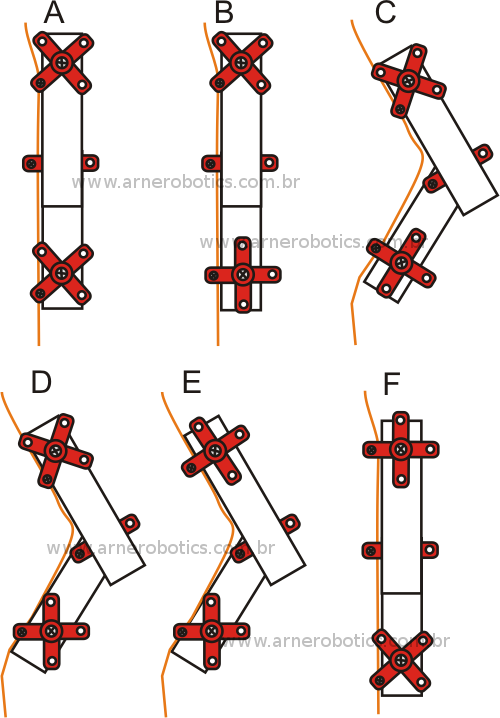
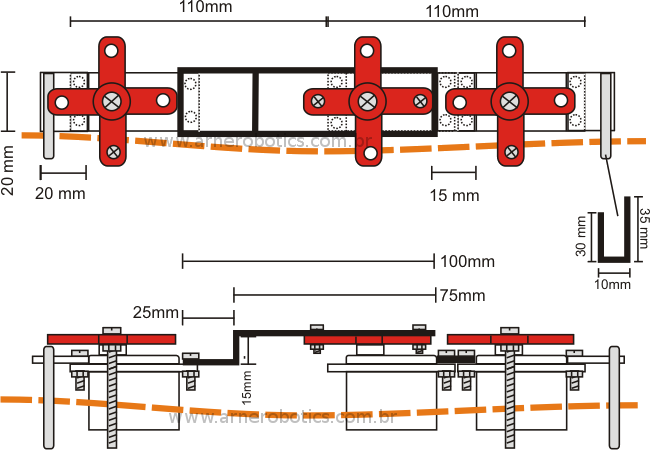
COMO O ROBÔ SE MOVIMENTAOs movimentos do Robô Alpinista são muito diferentes dos considerados “normais” para um robô. Na maioria dos casos aplicam-se rodas, esteiras ou até mesmo “pernas”. Porém para estas aplicações, estaria me referindo a robôs cujo deslocamento seria feito no chão. A proposta do robô alpinista é um pouco diferente e, eu diría até um tanto inusitada. Para se locomover o robô necessita de um cabo, seja na vertical ou na horizontal e precisa ainda estar “fora do chão”, ou seja, deve estar “nas alturas” (mas nem tanto). Ele utiliza duas garras (uma superior e outra inferior) e uma “junta” central para executar quatro movimentos básicos: agarrar, soltar, dobrar e esticar. A seqüência com que estes movimentos são executados em cada parte do robô (garra superior e inferior ou junta) determinará a direção em que o mesmo seguirá. As garras e a junta são na verdade, servos de aeromodelo. Com estes consegue-se boas alavancas com excelente precisão. Na figura abaixo mostro a seqüência dos movimentos necessários para que o robô realize um “passo”. Primeiro o robô é demonstrado “esticado” e com as duas garras fechadas, segurando o cabo. Este é o estado de descanso do robô. A seguir é mostrado a garra inferior aberta e a junta esticada. Depois mostro o robô com sua junta dobrada e a garra inferior aberta. Neste momento o robô avança alguns poucos centímetros na direção da garra superior. Em seguida o robô é demonstrado com a junta dobrada, mas com a garra inferior fechada. Neste momento ele busca apoio para executar o movimento de esticar. Depois o robô abre a garra superior (ainda dobrado) e em seguida o robô estica sua junta (garra superior aberta). Assim ele avança mais alguns centímetros em direção da garra superior. Agora o robô precisa fechar a garra superior. Desta maneira ele retornou ao estado inicial. Como pode-se observar a velocidade do robô não é alta.
Para que o robô retorne um “passo”, ou seja, avance na direção da garra inferior a seqüência deve ser invertida. Na tabela abaixo mostro uma analise da seqüência necessária para mover o robô em ambos os sentidos: Tabela - Seqüência de movimentos
Como pode ser percebido pela tabela acima, de acordo com o sentido desejado devemos inverter apenas o abrir e fechar das garras. O “dobrar” e “esticar” da junta é feito sempre na mesma ordem.
|


| Comandos Válidos (em formato ASCII) | Efeito | String (em formato ASCII) |
| 1 | Abre garra inferior | AL11 |
| 2 | Fecha garra inferior | AL12 |
| 3 | Abre garra superior | AL13 |
| 4 | Fecha garra superior | AL14 |
| 5 | Estica articulação | AL15 |
| 6 | Dobra articulação | AL16 |
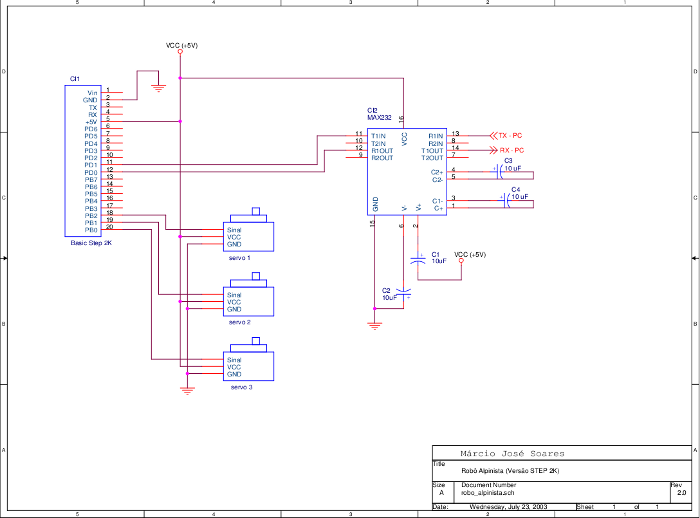
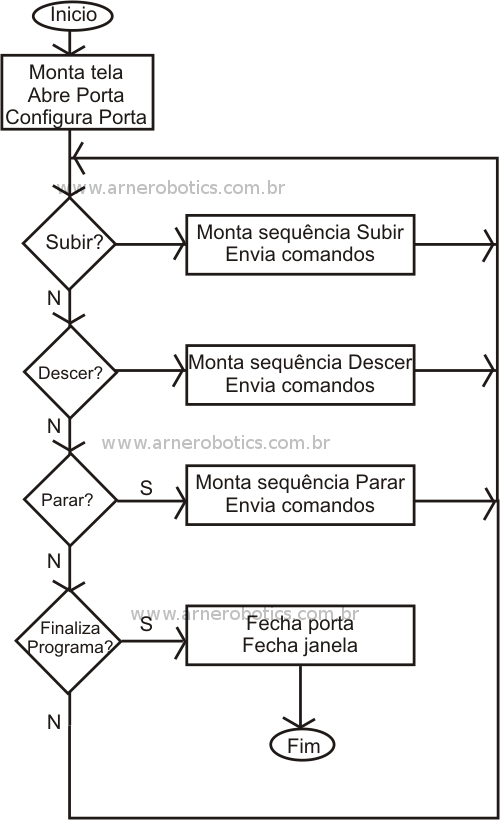
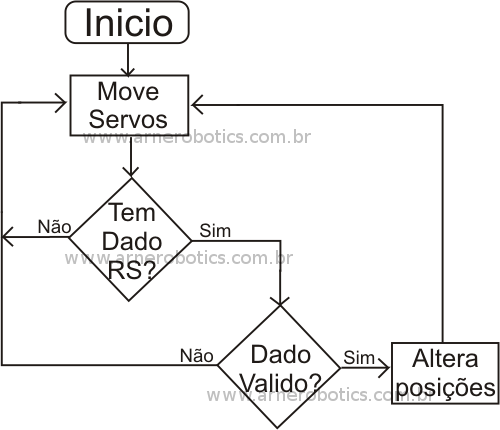
O funcionamento do programa ALPINISTA.BAS é bem simples. Ele inicia as variáveis necessárias e configura o BASIC STEP 2K. As interrupções do mesmo precisam estar ligadas, pois a função “SERVO” utiliza um dos “TIMER’s” do microcontrolador. A comunicação serial também utiliza uma interrupção, pois a mesma é feita via hardware. Com o uso do BASCOM, o BASIC STEP 2K pode realizar a comunicação RS-232 por dois modos distintos: por hardware, feita através de pinos específicos (PD0 e PD1), e por software, feita através de qualquer pino.
Após iniciar o “ambiente”, o BASIC STEP 2K aguarda uma string de comando, faz a analise da mesma e se valida executa o comando solicitado, mudando a posição de um dos servos, dependendo do comando recebido. Após a alteração da posição dos servos, omicrocontrolador envia um byte para avisar o programa no PC que o comando foi recebido. Com isso tem-se um sincronismo entre recepção e transmissão. Na figura abaixo é mostrado o fluxograma para o programa ALPINISTA.BAS.
DOWNLOADS:
- Esquema elétrico
- Código fonte para BS 2k (BASCOM)
- Código fonte para PC (Super Logo)
 | Este projeto foi publicado, com minha autorização, na Revista Mecatrônica Fácil nº 12 de Setembro/Outubro de 2003. Especificações: - Cérebro - BASIC STEP 2K (ou BS1)
|
Copyright deste conteúdo reservado para Márcio José Soares e protegido pela Lei de Direitos Autorais LEI N° 9.610, de 19 de Fevereiro de 1998. É estritamente proibida a reprodução total ou parcial do conteúdo desta página em outros pontos da internet, livros ou outros tipos de publicações comerciais ou não, sem a prévia autorização por escrito do autor. |
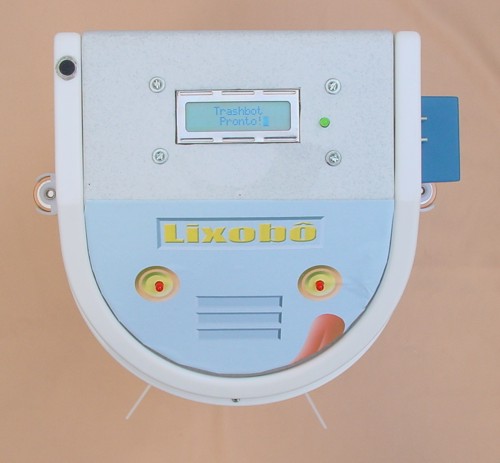
Robô Lixobô
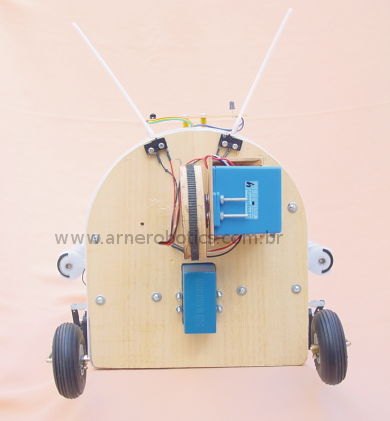
| http://www.arnerobotics.com.br/eletronica/robotica/robo_lixobo.htm Robô Lixobô O Robô Lixobô é uma "lixeira móvel". Ele possui um sensor de "som" que ao ser acionado com um assovio, um bater de palmas ou um estalar dos dedos o coloca em operação. Usando servos de "posicionamento" para antena parabólica ele pode controlar sua direção, se mover e também abrir e fechar a tampa da lixeira. O robô também possui um sensor IR e bumper's de colisão (chaves) que permitem que ele navegue por uma sala, desviando dos obstáculos. No projeto preferi utilizar um microcontrolador Basic Step 2k devido ao algoritmo utilizado. Um display serial na tampa, juntamente com dois led's e um buzzer completam a parafernália inserida no "monstrinho". Clique para ampliar
Todos nós sabemos que há um concenso mundial sobre a preservação do meio ambiente. Sem os ricos ecossistemas, existentes no planeta, o “homem” não tem (ou terá) a mínima chance de sobrevivência no futuro. Cada vez mais as pessoas passam a perceber esta importância e a se questionar sobre o “mundo a sua volta”. E o lixo sem dúvida alguma é um dos maiores problemas que enfrentaremos no futuro (e bem próximo!). Quando jogamos uma simples garrafa plástica no lixo, temos a ilusão que ela “se foi”. Não voltará mais e não nos criará problema algum. Pura ilusão. Infelizmente a reciclagem ainda não é algo que funciona 100%. Ela não acontece como deveria e os lixões de nossas cidades se “entopem”, a cada dia, das sobras do que usamos em casa. Um exemplo das conseqüências do excesso de lixo é a poluição dos lençóis freáticos (utilizados no abastecimento de água de muitas cidades), enchentes (quantas cidades não tem suas bocas de lobos entupidas com lixo!), poluição com metais pesados, etc. Realmente o lixo, é um lixo! Pensando nisso, construí o robô “Lixobô”. Ele não realiza a reciclagem do lixo, mas participa de uma parte extremamente importante: a coleta e consequentemente a concientização da importância do tema "Lixo", com uma coleta seletiva, com a separação do material que pode ser reciclado do material orgânico (que pode ser aproveitado como adubo livre de qualquer química) é algo que pode ser feito por cada um de nós. E isto já é um grande passo.
O funcionamento do “Lixobô” é bem simples. Ao ser ligado ele indica no display sua prontidão, mantendo-se parado. Ao ser “chamado”, com um bater de palmas ou outro som qualquer (alto), ele abrirá a tampa da lixeira (ou sua boca, dependendo do design adotado) e se colocará em movimento, iniciando uma “coleta” pela sala. A presença de um sensor Infravermelho e dois bumper’s (sensores de colisão) permite que o robô “veja” os obstáculos, realizando os desvios necessários. A “coleta” se é feita durante 15 segundos. Durante este período os usuários poderão utilizar a lixeira “automatizada”. Perceba que muitos outros algoritmos (programas) poderiam ser implementados, alterando as funções, tempos, e modos de operação. Tudo é possível com uma dose de criatividade!
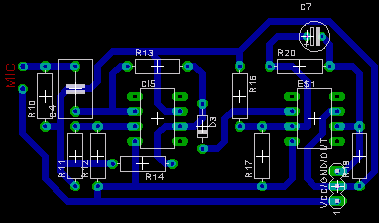
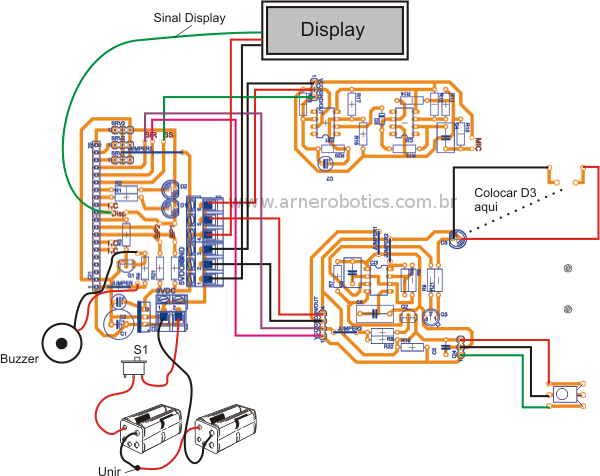
Na figura abaixo pode ser visto o esquema elétrico do robô. O microcontrolador escolhido para o controle do robô foi o BASIC STEP 2K da Tato Equipamentos Eletrônicos ou o Fast Basic da Symphony Robótica Educacional / AVR System. 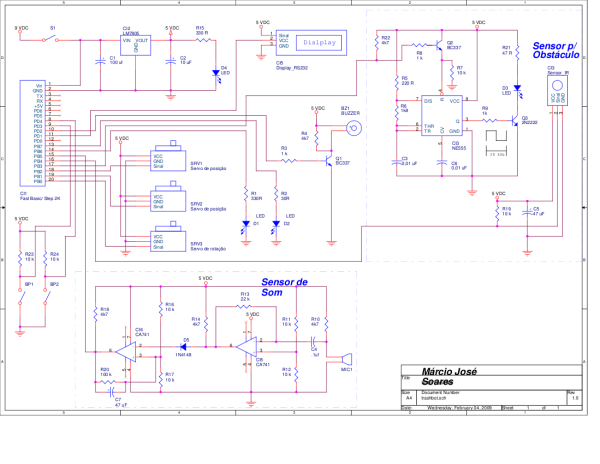 O circuito “sensor IR” é composto por CI3 e CI4. CI3 é um NE555 e foi aplicado como oscilador astável. Sua freqüência de oscilação pode ser calculada com a seguinte fórmula:
Sendo assim tem-se:
Está freqüência aproximada de 38KHz (temos que considerar as fugas e imprecisões dos componentes utilizados) é justamente a freqüência de trabalho do CI4 (PHSC38). A maioria dos controles remotos IR operam nesta freqüência. Quando CI4 “enxerga” o sinal refletido pelo conjunto emissor (configuração astável de CI3) o mesmo coloca em sua saída (Vout) zero volts. Quando isto ocorre, o microcontrolador é capaz de perceber o obstáculo. O transistor Q2 controla CI3 através do seu pino de reset. Sempre que este pino é colocado em nível lógico baixo (“0”) o CI é desligado. Quando em nível lógico “alto” (Vcc) o mesmo volta a operar. O circuito “sensor de som” é formado por CI5 e CI6 (amplificadores operacionais). A função básica do CI5 é amplificar o sinal vindo do microfone. Esta amplificação tem um ganho baixo para evitar que o robô inicie uma coleta erroneamente (fora de hora!) devido a ruídos, por exemplo. CI6 opera como um comparador. Sempre que o sinal de saída de CI5 for menor que 2,5V tem-se na saída de CI6, também zero volts. O nível do sinal de saída para o “sensor de som” foi adotado desta maneira para manter uma certa compatibilidade com o “sensor IR”, já que os níveis lógicos que indicam o sensor ativado é sempre “zero”. As chaves BP1 e BP2 são bumper’s e auxiliam na detecção de obstáculos, já que o sensor IR não pode detectar obstáculos inseridos fora do seu raio de alcance, colocados abaixo ou ao lado do mesmo. O display serial foi utilizado para mostrar mensagens como “Lixobô Pronto”, “Obstáculo detectado”, etc. Em meu protótipo utilizei um display serial da Symphony Robótica Educacional com a seguinte configuração: 9600bps, 8 bits de dados, 1 stop bit e sem paridade (nível TTL - 5 VDC). Foram utilizados também três servos: SRV1 e SRV2 são servos de posição, e SRV3 servo de rotação. Os led’s D1 e D2 acrescentaram um efeito visual ao robô e o buzzer BZ1 o efeito sonoro. O led D3 foi usado para indicar a presença dos 5 VDC da fonte.
Para uma “coleta” durante um tempo maior (ou menor), basta alterar o número de vezes a ser multiplicado por 0,25 segundos. Não aumentei o tempo de 0,25 segundos, pois isso poderia fazer com que o robô demorasse a detectar os obstáculos, pois enquanto a “temporização” está em andamento, o robô simplesmente não “enxerga” nada a sua frente! Um outro ponto do programa é a rotina de reversão do sentido do robô. No programa eu decidi fazê-la de maneira a não utilizar a interrupção para servos. Fiz isso para entender e aprender melhor como trabalhar com este tipo de servo sem o uso da Int do Bascom. Todo o programa foi devidamente comentado, o que facilita muito o seu estudo e qualquer modificação que um terceiro julgar necessário/interessante. Modificar programas prontos é um excelente ponto de partida para o aprendizado! Experimente a vontade!!!
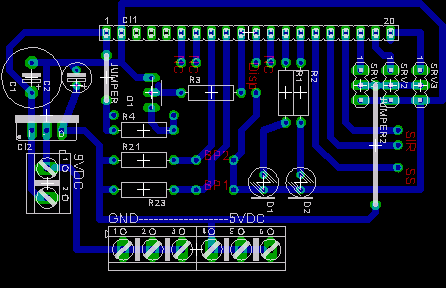
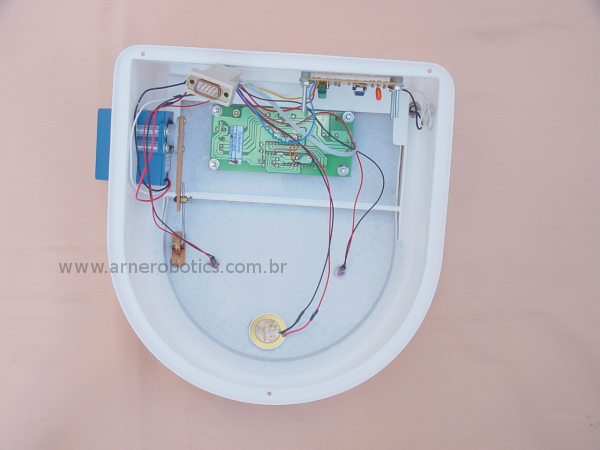
- Placa CPU (principal).
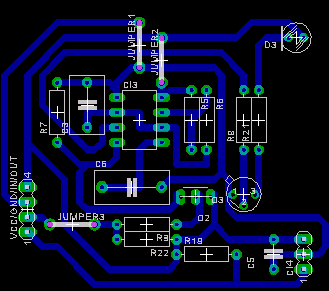
- Circuito elétrico
|








{kind=link}
| |
Assinar:
Postagens (Atom)