| http://www.arnerobotics.com.br/eletronica/robotica/alpinista.htm Robô Alpinista
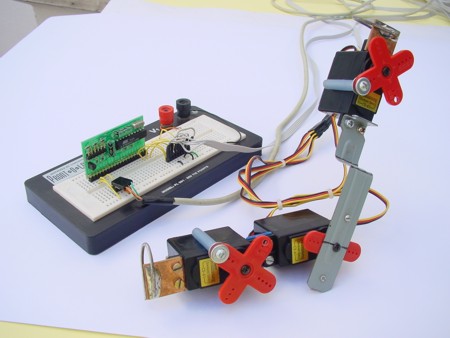
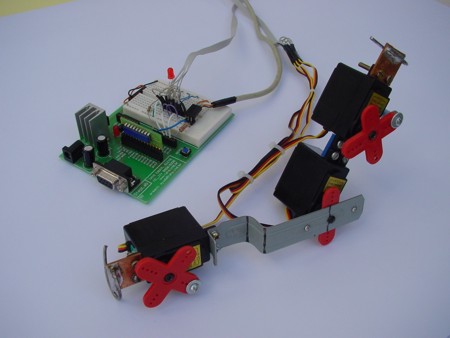
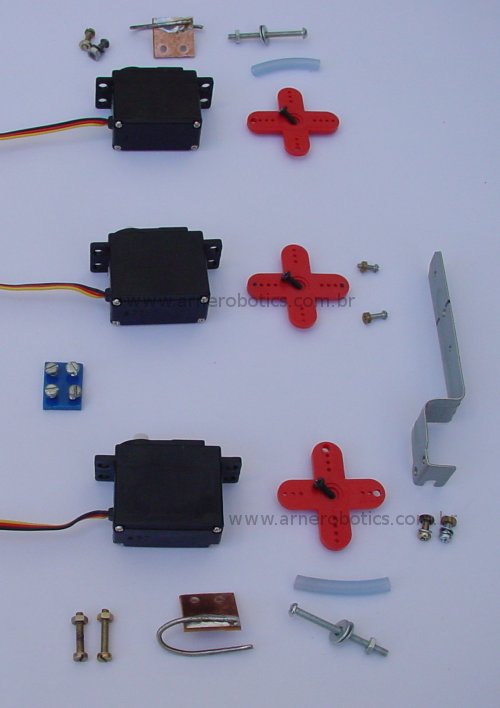
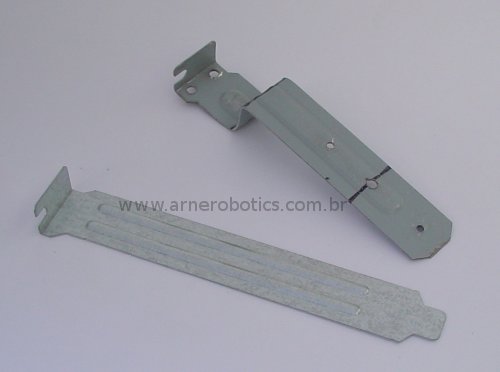
O Robô Alpinista é um robô "mais que diferente", pois não utiliza rodas, "pernas", esteiras, e outras para sua locomoção. Ele usa as garras e a articulação do seu "corpo". A parte mecânica é extremamente simples e foi desenvolvida com material de sucata (.. veja as fotos!). Ele pode percorrer um cabo na vertical ou na horizontal. A velocidade de deslocamento não é grande, mas vê-lo em "ação" é muito interessante. Clique para ampliar
Todo o controle é feito através de um PC com LOGO, http://www.nied.unicamp.br, ou outro programa qualquer e um BASIC STEP 2K (http://www.tato.ind.br). Eu desenvolvi duas versões: uma com o BASIC STEP 1 e outra com o BASIC STEP 2K, sendo esta última a que apresentou os melhores resultados e, portanto, a que será aqui comentada.
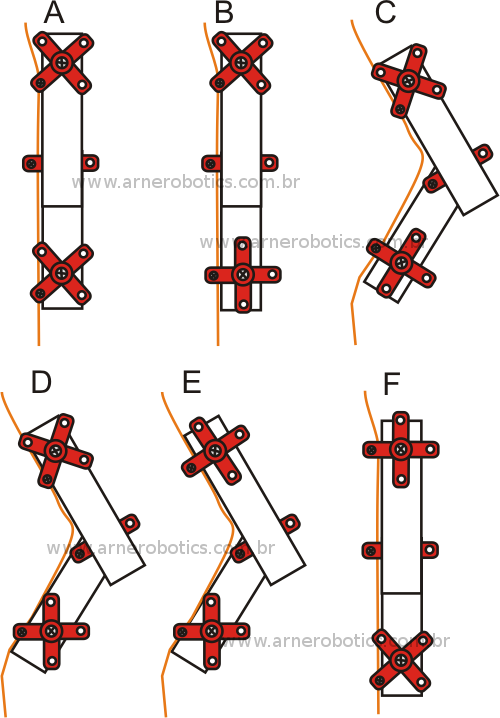
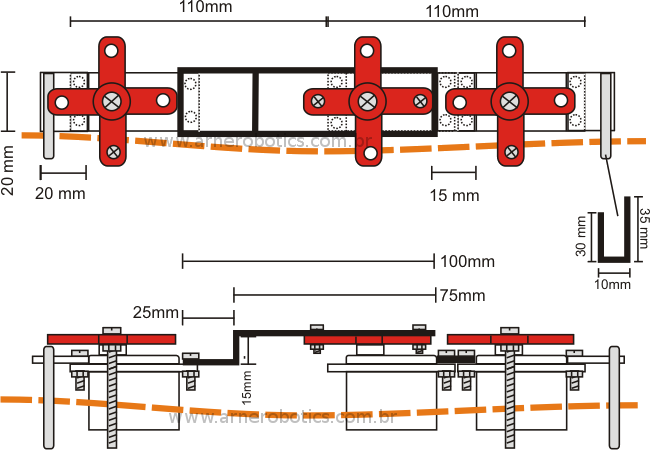
COMO O ROBÔ SE MOVIMENTAOs movimentos do Robô Alpinista são muito diferentes dos considerados “normais” para um robô. Na maioria dos casos aplicam-se rodas, esteiras ou até mesmo “pernas”. Porém para estas aplicações, estaria me referindo a robôs cujo deslocamento seria feito no chão. A proposta do robô alpinista é um pouco diferente e, eu diría até um tanto inusitada. Para se locomover o robô necessita de um cabo, seja na vertical ou na horizontal e precisa ainda estar “fora do chão”, ou seja, deve estar “nas alturas” (mas nem tanto). Ele utiliza duas garras (uma superior e outra inferior) e uma “junta” central para executar quatro movimentos básicos: agarrar, soltar, dobrar e esticar. A seqüência com que estes movimentos são executados em cada parte do robô (garra superior e inferior ou junta) determinará a direção em que o mesmo seguirá. As garras e a junta são na verdade, servos de aeromodelo. Com estes consegue-se boas alavancas com excelente precisão. Na figura abaixo mostro a seqüência dos movimentos necessários para que o robô realize um “passo”. Primeiro o robô é demonstrado “esticado” e com as duas garras fechadas, segurando o cabo. Este é o estado de descanso do robô. A seguir é mostrado a garra inferior aberta e a junta esticada. Depois mostro o robô com sua junta dobrada e a garra inferior aberta. Neste momento o robô avança alguns poucos centímetros na direção da garra superior. Em seguida o robô é demonstrado com a junta dobrada, mas com a garra inferior fechada. Neste momento ele busca apoio para executar o movimento de esticar. Depois o robô abre a garra superior (ainda dobrado) e em seguida o robô estica sua junta (garra superior aberta). Assim ele avança mais alguns centímetros em direção da garra superior. Agora o robô precisa fechar a garra superior. Desta maneira ele retornou ao estado inicial. Como pode-se observar a velocidade do robô não é alta.
Para que o robô retorne um “passo”, ou seja, avance na direção da garra inferior a seqüência deve ser invertida. Na tabela abaixo mostro uma analise da seqüência necessária para mover o robô em ambos os sentidos: Tabela - Seqüência de movimentos
Como pode ser percebido pela tabela acima, de acordo com o sentido desejado devemos inverter apenas o abrir e fechar das garras. O “dobrar” e “esticar” da junta é feito sempre na mesma ordem.
|


| Comandos Válidos (em formato ASCII) | Efeito | String (em formato ASCII) |
| 1 | Abre garra inferior | AL11 |
| 2 | Fecha garra inferior | AL12 |
| 3 | Abre garra superior | AL13 |
| 4 | Fecha garra superior | AL14 |
| 5 | Estica articulação | AL15 |
| 6 | Dobra articulação | AL16 |
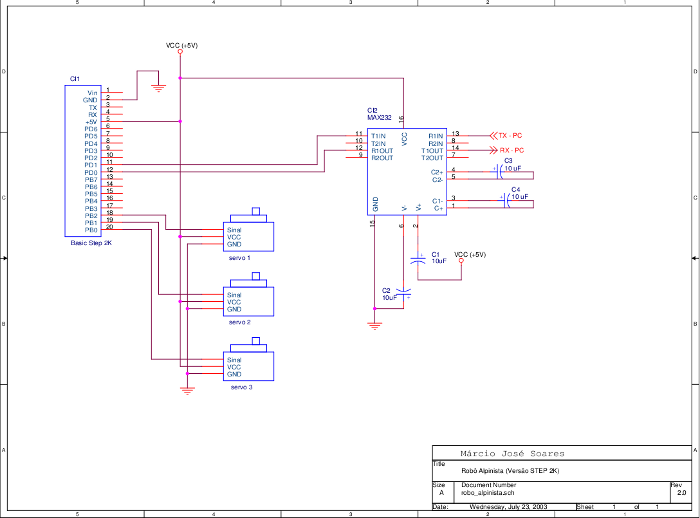
O funcionamento do programa ALPINISTA.BAS é bem simples. Ele inicia as variáveis necessárias e configura o BASIC STEP 2K. As interrupções do mesmo precisam estar ligadas, pois a função “SERVO” utiliza um dos “TIMER’s” do microcontrolador. A comunicação serial também utiliza uma interrupção, pois a mesma é feita via hardware. Com o uso do BASCOM, o BASIC STEP 2K pode realizar a comunicação RS-232 por dois modos distintos: por hardware, feita através de pinos específicos (PD0 e PD1), e por software, feita através de qualquer pino.
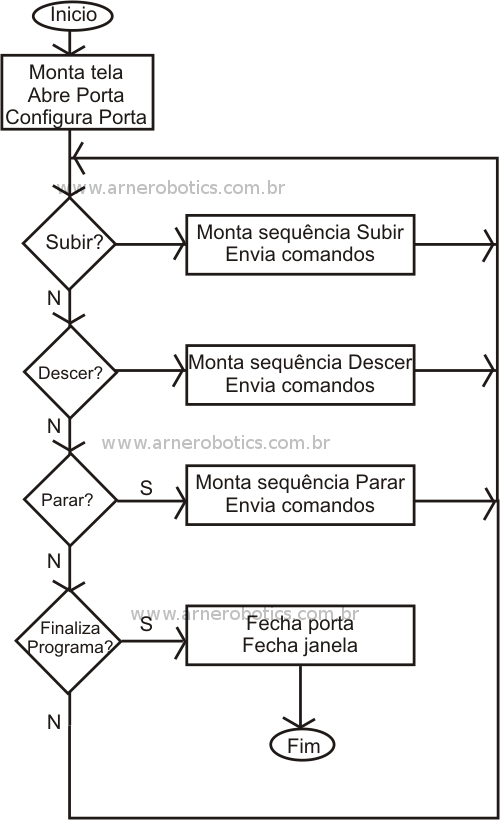
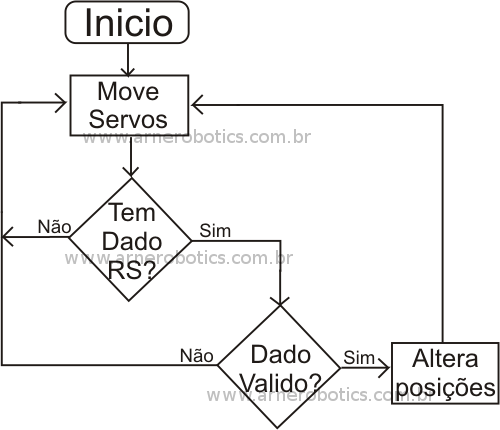
Após iniciar o “ambiente”, o BASIC STEP 2K aguarda uma string de comando, faz a analise da mesma e se valida executa o comando solicitado, mudando a posição de um dos servos, dependendo do comando recebido. Após a alteração da posição dos servos, omicrocontrolador envia um byte para avisar o programa no PC que o comando foi recebido. Com isso tem-se um sincronismo entre recepção e transmissão. Na figura abaixo é mostrado o fluxograma para o programa ALPINISTA.BAS.
DOWNLOADS:
- Esquema elétrico
- Código fonte para BS 2k (BASCOM)
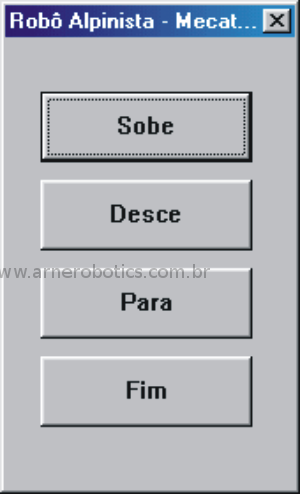
- Código fonte para PC (Super Logo)
 | Este projeto foi publicado, com minha autorização, na Revista Mecatrônica Fácil nº 12 de Setembro/Outubro de 2003. Especificações: - Cérebro - BASIC STEP 2K (ou BS1)
|
Copyright deste conteúdo reservado para Márcio José Soares e protegido pela Lei de Direitos Autorais LEI N° 9.610, de 19 de Fevereiro de 1998. É estritamente proibida a reprodução total ou parcial do conteúdo desta página em outros pontos da internet, livros ou outros tipos de publicações comerciais ou não, sem a prévia autorização por escrito do autor. |
Nenhum comentário:
Postar um comentário